Stepper FOC Controller Simulation
回顾:
在无刷电机的FOC控制里,其核心思想是"解耦",利用数学中的坐标变换,将三相坐标系下电机电流转换到交轴Iq与直轴Id,再通过设计控制器如PID,ADRC等方法对电机完成控制。而步进电机,其本质也可以理解为一种两相的无刷电机,因此,可以借鉴三相无刷电机的FOC控制,实现步进电机的精准控制。
步进电机模型
对于常见的步进电机控制方法,也就是脉冲控制,指的是输入一个脉冲,电机转子就步进一下,所以在这种控制方法下,输出的角度和脉冲数有关,成正比,而转速则和脉冲的频率有关。对于此次使用的两相四线步进电机,有四根线,电机可以简化成一下模型:
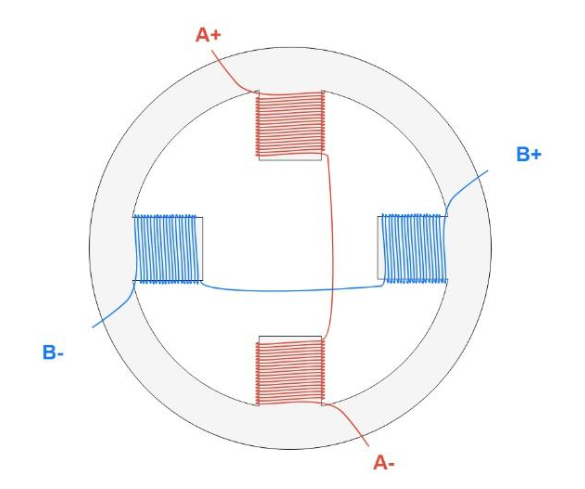
通俗来理解,就是当电流从A+流入,A-流出时,产生了一个N-S磁极,吸引中间的转子转动,接着换B+流入B-流出,产生另一对磁极,不断吸引转子转动。而在此过程中,衍生出很多控制方式,对于现在成本较高的,也就是混合式步进电机,大概是这样:
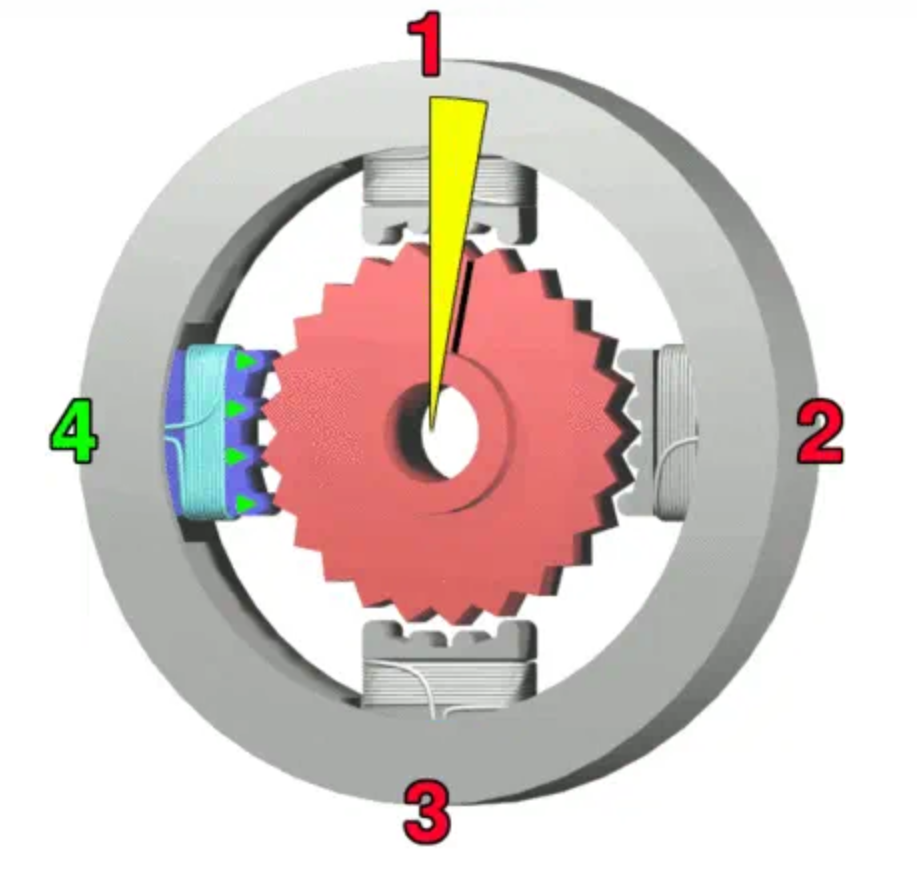
转子是带齿冠的,因此分辨率更高,通常都是1.8°的步距角,也就是转一圈200个脉冲。我们要控制的也是这种电机。
foc控制
clark变换
经过BLDC的FOC控制,可以知道核心的一部分就是通过坐标变换,也就是先使用clark变换将三个相位相差120°的正弦信号转换到α-β两相坐标系下,这一步也很简单,就是:
⎩⎨⎧IβIα=sin32πIb−sin32πIc=Ia+cos32πIb+cos32πIc
而我们的步进本身就是两相直角坐标系,因此,反而是省去了clark变换这一步。
park变换
对于park变化,和bldc时一致,也就是把两相静止的α-β坐标转换到随转子θ旋转的qd轴上,也是比较简单的数学变换:
{IdIq=cos(θ)Iα+sin(θ)Iβ=−sin(θ)Iα+cos(θ)Iβ
SVPWM
除了基础的数学变换,另一个关键的部分就是SVPWM的计算过程,这一块需要和BLDC的SVPWM��计算过程调整一下。
由于步进电机两个线圈之间没有连接,因此需要两个H桥来控制AB相,先画出逆变示意图:
如果我们记:
Sx={1−上桥臂连通,下桥臂断开0−上桥臂断开,下桥臂连通
对于BLDC的三相全桥逆变,一共有23个基础矢量,而步进这里有四个�全桥,也就是有24个基础矢量,
以一种情况为例:如A+的上桥臂连通,下桥臂断开,A-、B+、B-相的上桥臂断开,下桥臂断开,此时,也就是Sa+=1,Sa−=0,Sb+=0,Sb−=0,
此时UA+=Udc,以此类推,得到:
| Sa+ | Sa− | Sb+ | Sb− | Uα | Uβ | 模长 |
|---|
| 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 0 | 0 | 0 | 1 | 0 | -Udc | Udc |
| 0 | 0 | 1 | 0 | 0 | Udc | Udc |
| 0 | 1 | 0 | 0 | -Udc | 0 | Udc |
| 0 | 0 | 1 | 1 | 0 | 0 | 0 |
| 0 | 1 | 0 | 1 | -Udc | -Udc | 2Udc |
| 0 | 1 | 1 | 1 | -Udc | 0 | Udc |
| 0 | 1 | 1 | 0 | -Udc | Udc | 2Udc |
| 1 | 0 | 0 | 0 | Udc | 0 | 0 |
| 1 | 1 | 0 | 0 | 0 | 0 | 0 |
| 1 | 0 | 1 | 0 | Udc | Udc | 2Udc |
| 1 | 0 | 0 | 1 | Udc | -Udc | 2Udc |
| 1 | 0 | 1 | 1 | Udc | 0 | Udc |
| 1 | 1 | 1 | 0 | 0 | Udc | Udc |
| 1 | 1 | 0 | 1 | 0 | -Udc | Udc |
| 1 | 1 | 1 | 1 | 0 | 0 | 0 |
并画出16个矢量的矢量圆图:
最终将矢量圆分为了四个扇区:
以扇区1为例:
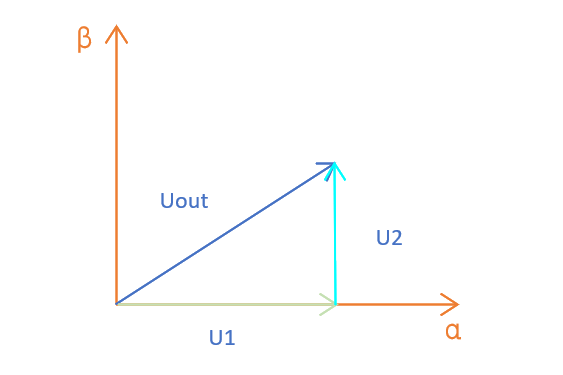
记T为总时长,T0为零矢量时间,T1为在α轴上(U0)上的作用时间,T2为在β轴上(U90)上的作用时间,所以
T=T0+T1+T2
U2=(T2/T)U90
U1=(T1/T)U90
也就是:
⎩⎨⎧UαUβ=TT1∣U0∣=TT2∣U90∣
同时为了保证幅值不变原则,需要使∣U0∣=∣U90∣=2Udc
因此,容易得出四个扇区各个矢量占空比关系:
| 扇区 | I | II | III | IV |
|---|
| Tb | 22Uβ | 22Uβ | -22Uβ | -22Uβ |
| Ta | 22Uα | -22Uα | -22Uα | 22Uα |
使用N=2*b+a+1来计算扇区:
Simulation
所以大致思路就是对电机获得的αβ电流以及转子θ角度,park变换得到dq电流,对dq电流进行控制,将输出的dq电压进行反park变换,得到应输出的αβ电压,送入svpwm计算,最终给硬件全桥,来控制电机。接下来就来搭建simulation过程,使用matlab的simulink工具